3lb Combat Robot: Asbestos
This robot was primarily made for me to learn more about the effectiveness of gears.
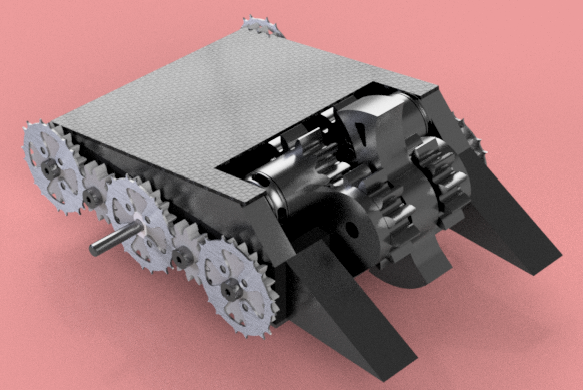
This was the original design that I submitted to the club for the funding request, it was a quick mockup which just showed the general concept. I was planning on doing six wheel drive with cleats, but after building the robot, I realized that since theres no differential or anything, the cleats would fight each other when the robot would try to rotate in place.
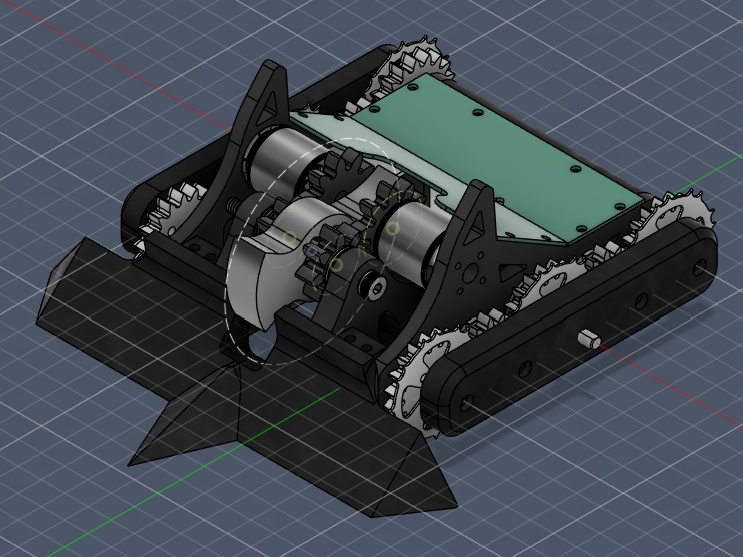
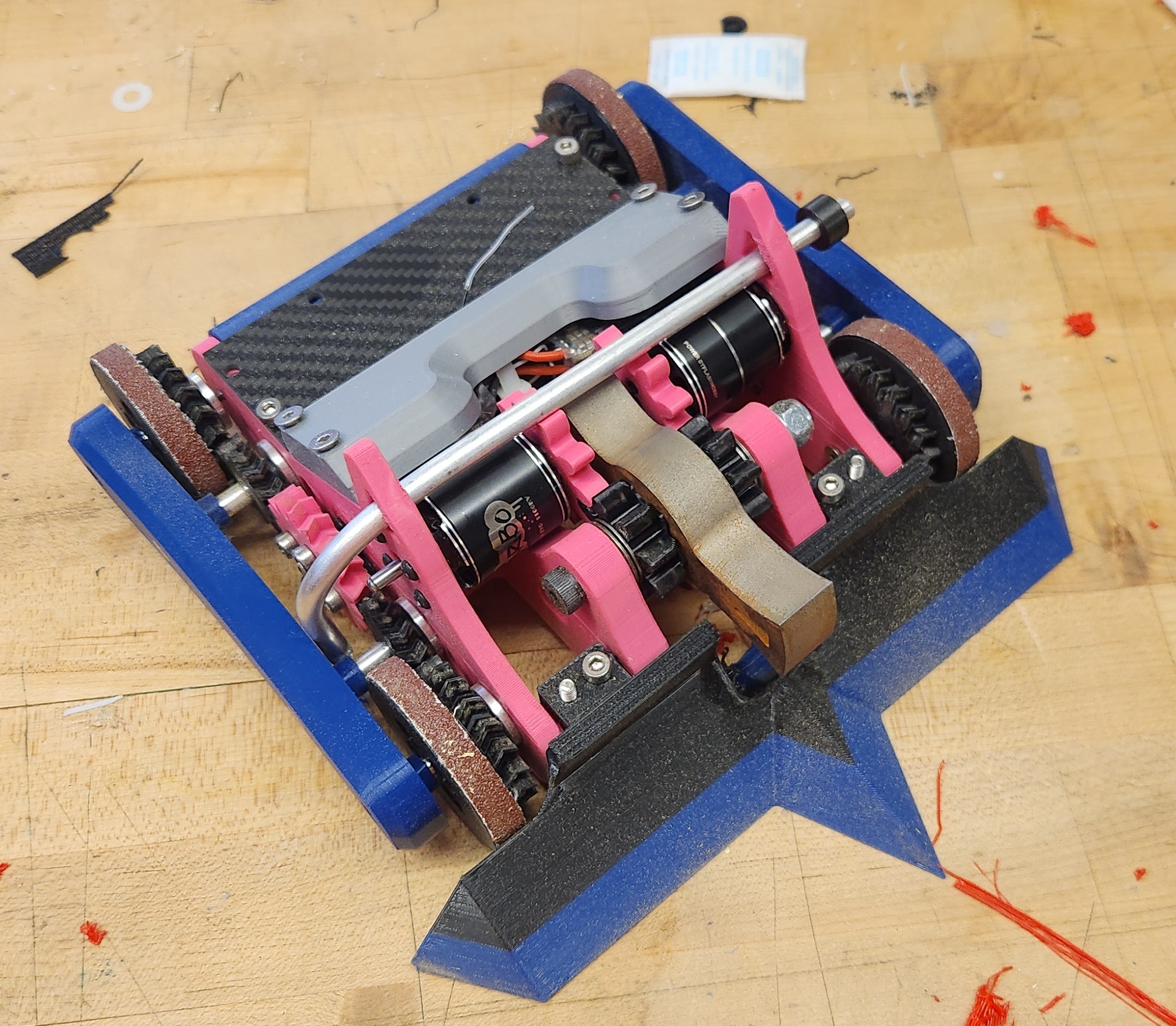
This robot was designed over the course of 2 weeks, but due to time constraints I had to build the robot in 2 days. It was originally designed to use cleats for extra grip, but I had to do many changes to ensure that everything would working within my time constraints. One clear example of this is switching to sand paper wheels, since I didn't have enough time to cast proper wheels. All torque transfer is done with gears, the wheels use herringbone gears while the weapon uses spur gears. I'm planning on competing with this robot within the next month with a few more upgrades. Most notably to the electronics and the drive system mounting.